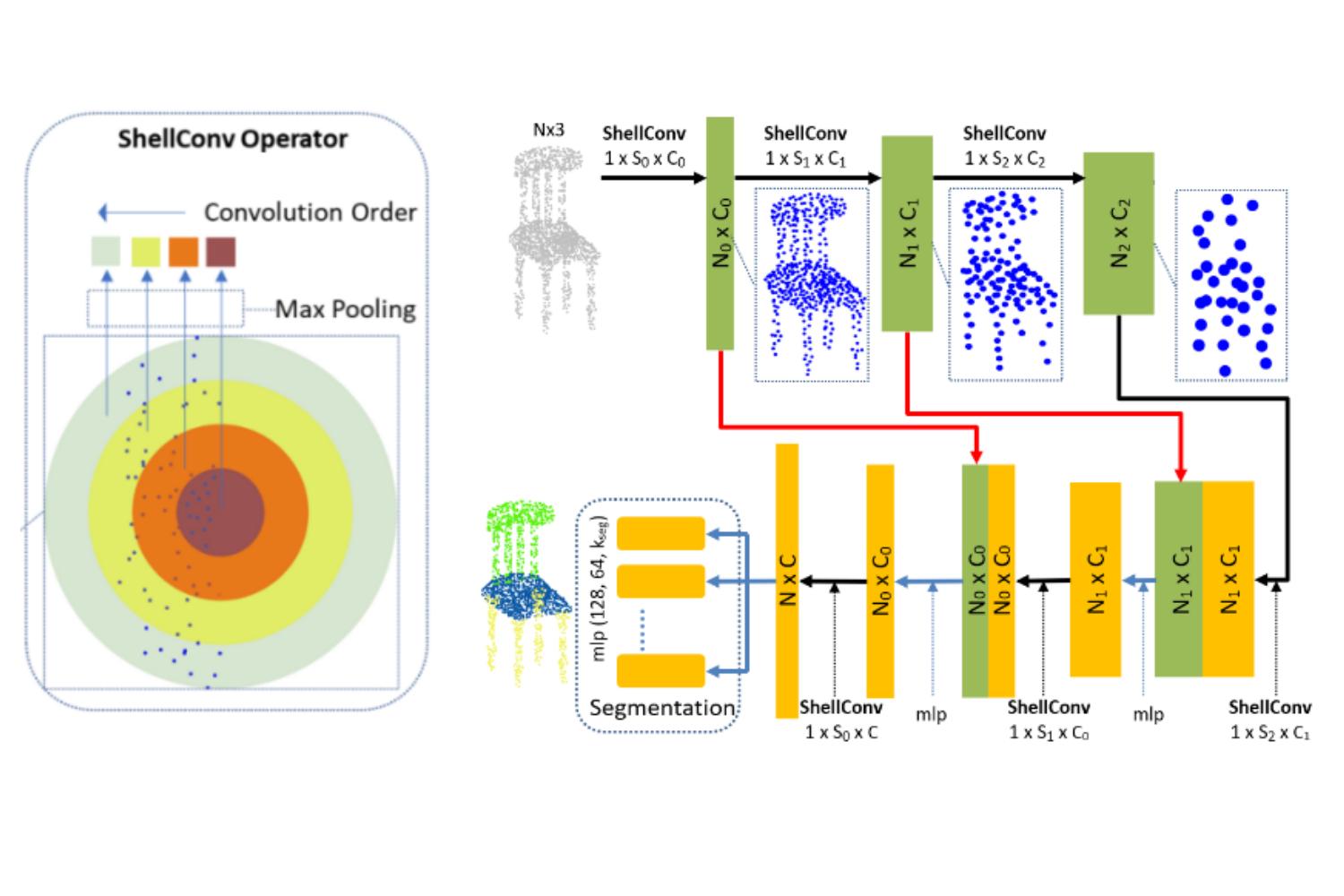
ShellNet Row Detection for LIDAR-base navigation
My Contribution Highlights
- Transformed ShellNet from authors TensorFlow implementation to Pytorch implementation
- Enabled LIDAR-base navigation on CPU machine with raw pointclouds
- Implemented ROS integration code for easy robot integration
More About the Project
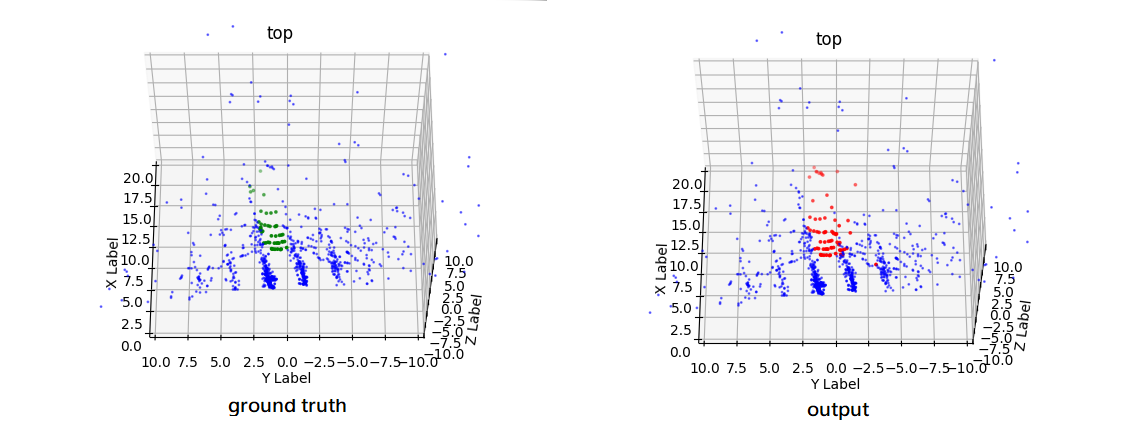
Inspired by my capstone project at Carnegie Mellon University, I conducted an independent study at Field Robotic Center under George Kantor’s supervision. My role was to investigate pure LIDAR-based, in-row navigation for algricultural robots. I labeled 150 LIDAR pointcloud data into training data, which were used to train an ShellNet model from scrath on AWS machine. As a result, the model achieved 0.75 IOU performance.
Source Code
Visit my repository for more technical details